




가위 리프트, 버킷 리프트, 붐 장착 버킷, 차량 장착 붐 버킷 등 많은 이름으로 불리지만, 모두 모바일 상승 작업 플랫폼인 MEWP입니다.

건설, 창고, 유틸리티 및 응용 프로그램이 존재하는 다른 산업에서 찾을 수 있으며, 사람을 지상에서 특정 높이로 이동하고 안전하고 간단하고 반복적으로 수행 할 수 있습니다.
틸트 센서와 스위치는 작업자의 안전 조건을 개선하고 팁 오버 및 기타 작업장 사고를 방지하는 데 중요한 역할을 하는 것으로 입증되었습니다.
MEWP 사고는 가위 리프트, 텔레스코픽(텔레핸들러) 또는 음과같은 공중 장치 및 수직 마스트 리프트에서 발생할 수 있습니다. 가장 일반적인 MEWP 사고는 다음과 같습니다.
- 함정: MEWP와 고정 구조 사이에 갇혀있는 운영자
- 전복: 경사 또는 압력과 같은 지면 조건으로 인해 MEWP가 전복됩니다.
- 떨어지는: MEWP 플랫폼에서 떨어지는 연산자
- 충돌: MEWP는 보행자, 다른 차량 또는 전력선과 충돌
이러한 일반적인 사고가 업무 장소에서 발생하지 않도록 하려면 올바른 기울기 센서, 경사계 및 틸트 스위치가 어떻게 팀의 안전과 생산성을 향상시킬 수 있는지 알아보십시오. 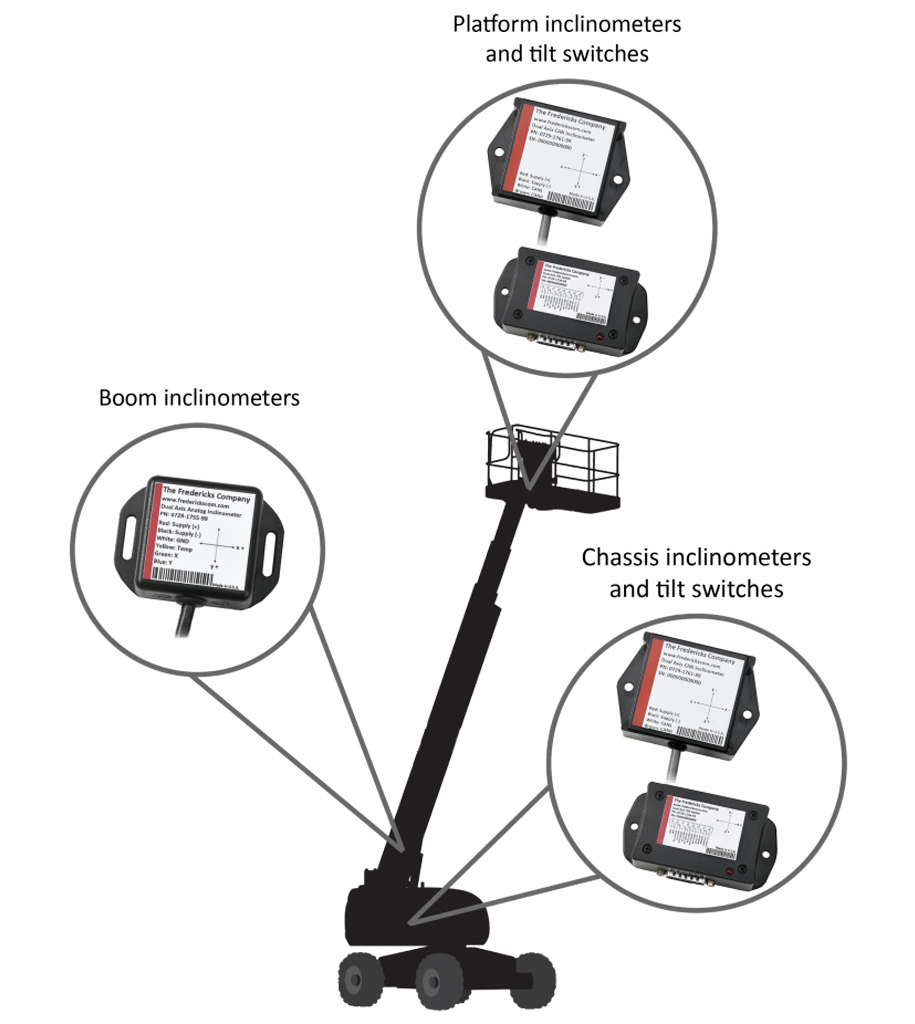
- 섀시 틸트 각도 모니터링: 섀시 각도 측정은 MEWP의 베이스가 차량 작동을 위한 안전한 각도 제한 내에 있음을 보장합니다. 센서가 차량이 작동하기에 안전하지 않은 위치에 있음을 나타내는 경우 MEWP 차량 컨트롤러는 붐 리프트에서 붐을 확장하거나 이동하거나 가위 리프트의 플랫폼 높이를 높이는 등의 조치를 취하는 운전자의 능력을 저해할 수 있습니다. 작업자가 이러한 작업을 수행할 수 없으므로 전복 또는 낙하 가능성이 크게 줄어듭니다.
- 플랫폼 기울기 각도 모니터링: 플랫폼 각도 측정은 차량의 플랫폼이 차량의 섀시수준임을 보장하며, MEWP 차량 컨트롤러가 부하 계산을 할 수 있도록 다른 센서와 함께 사용할 수 있습니다. 이로 인해 차량이 전복하거나 운전자가 떨어질 수 있는 안전하지 않은 하중이 방지될 수 있습니다.
- 플랫폼 높이 모니터링: 플랫폼 높이는 가위 리프트 암 각도 또는 붐 각도의 기능이므로 각도 측정을 통해 MEWP 차량 컨트롤러가 플랫폼 높이를 계산하고 다른 센서의 정보와 결합하여 부하 계산을 수행할 수 있습니다. 다시 말하지만, 이로 인해 차량이 전복하거나 운전자가 떨어질 수 있는 안전하지 않은 하중이 방지될 수 있습니다.
다음은 MEWP 애플리케이션용 틸트 센서, 경사계 및 틸트 스위치를 선택할 때 찾아야 할 몇 가지 주요 기능입니다.
- 정확도: 고려 중인 장치의 정확성을 이해해야 합니다. 공급업체는 종종 최종 사용자가 장치의 진정한 정확성을 이해하지 못하도록 정확도, 반복성 및 선형성의 정의를 교환합니다. 그러나 기울기 센서, 경사계 또는 틸트 스위치가 MEWP에서 경험한 진동 중에 정확한 출력을 제공하는 것이 중요합니다.
- 통합: 틸트 센서, 경사계 또는 틸트 스위치에 대한 올바른 출력을 선택하여 통합 프로세스를 가능한 한 간단하게 만들어야 합니다.
- 환경 보호 및 인증: 선택한 틸트 센서, 경사계 또는 틸트 스위치가 IP 등급과 같은 충분한 환경 보호를 가지고 있는지, CE, UL, RoHS 또는 REACH와 같은 필요한 인증 및 규정 준수가 있는지 확인합니다.
- 가격: 풍부하고 매우 높은 정확도기울 센서, 경사계 및 틸트 스위치가 매력적인 옵션처럼 보일 수 있지만 OEM 응용 제품에는 가격이 엄수합니다.
Recommended Tilt Measurement Solutions for Construction Vehicles

Operating Range: ±60°
Interface: Analog

Operating Range: ±60°
Interface: Analog

Operating Range: ±60°
Interface: Analog

Operating Range: ±60°
Interface: Analog and PWM
